

A bending pneumatic actuator for limb therapy
Opportunity
Each year, millions of people suffer from injuries or diseases like strokes that disable their limbs and reduce their quality of life. To help patients with their daily tasks as they recover, devices like wearable exoskeletons that contain actuators to assist limb motion have been developed. These actuators are coupled with limbs near the joint areas and move in specified directions when energy is supplied. Thus, with physical-mechanical assistance, limbs can also perform these same movements with reduced muscular effort.
Many exoskeleton designs are considered ‘rigid’ as their wearable parts are made mostly of inflexible materials like metal or plastic. These systems and their actuators have components like motors and gearboxes designed more for industrial applications as opposed to human use. The result is a system that is bulky and cumbersome, whereas humans would benefit from a lighter and more portable version. Due to their rigidity, many of these exoskeletons also have limited movement. Therefore, there is a need for actuator systems that are more flexible, lightweight and constructed from materials more suited for daily use.
Technology
This invention is a novel design for pneumatic soft actuators that can be used alone or integrated within an exoskeleton for shoulder therapy. It features an array of modular air-inflated bladders attached to a flexible but inextensible plastic spine. The use of air in the design makes the pneumatic actuators lighter and cheaper to fabricate than their rigid counterparts. Using compliant fabrics for the bladders also makes the invention safer and capable of complex motions like bending.
The design works by arranging the modular bladders in a series on the plastic spine. The bladders are then injected with air, causing them to expand and push against each other, creating a bending motion. Varying air pressure in the bladders can create inflated elements of different sizes. This degree of control means that bending can be controlled without structurally changing the actuator itself.
When used to assist shoulder motion, the actuator can replicate natural shoulder movements like flexion and extension, as well as abduction and adduction. Each bladder is also removable and replaceable by hand, making the invention a ‘plug and play’-type system. This makes it simpler to change the actuator’s movements without deconstruction or refabrication. Applications that require both strength and flexibility, such as carrying heavy loads or gripping motions, are sure to benefit from this invention.
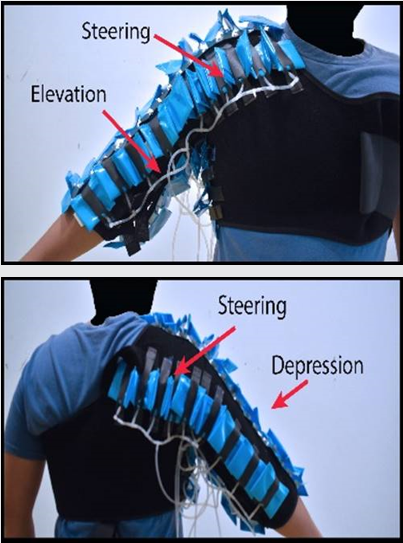
Figures should front and back view of the shoulder exoskeleton with mounted to a user.

Download
